My Current Projects
I currently work on designing and implementing APIs and simulation and visualization features for RoadRunner, Automated Driving, and Signal Processing Communications groups at MathWorks. Shown below are some of the highlights.
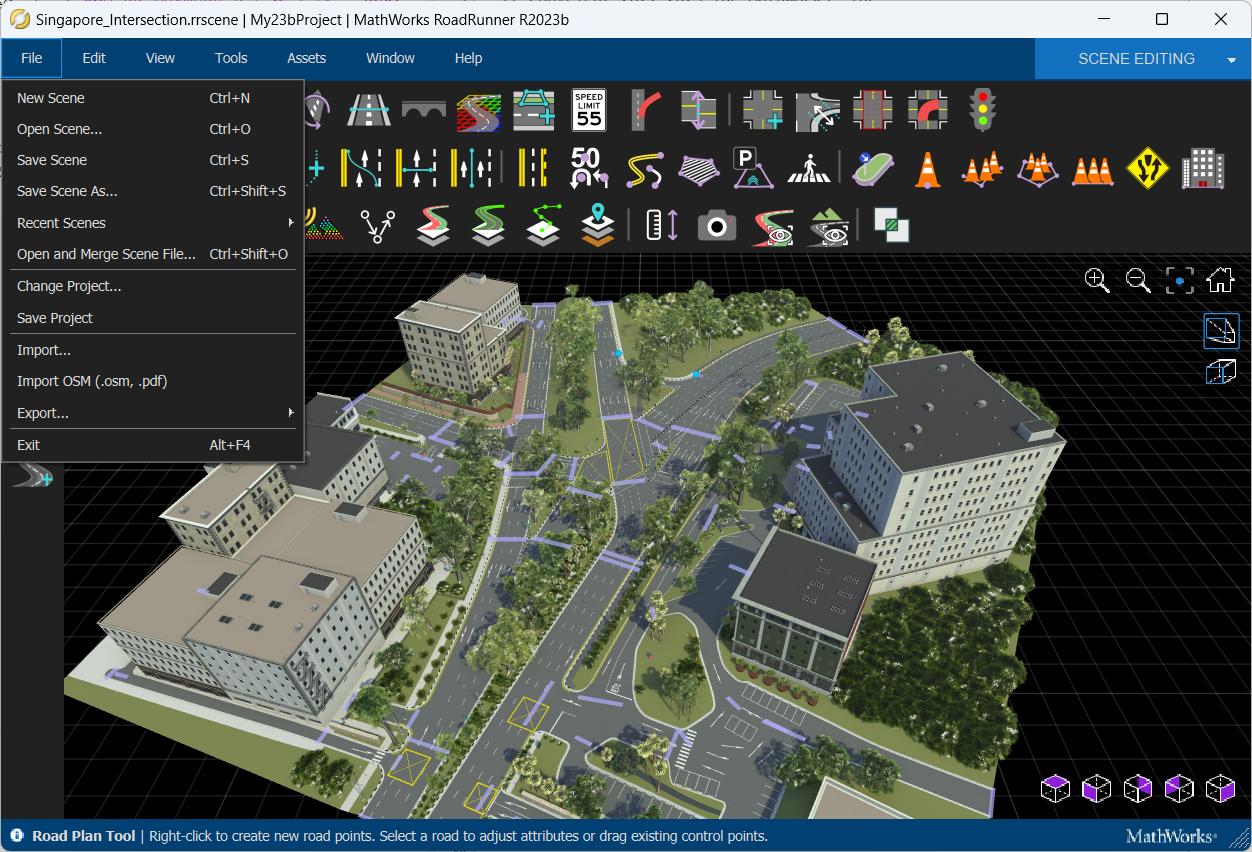
Scene & Scenario Authoring APIs
Scene and scenario authoring APIs in MATLAB and RoadRunner are tools that allow users to create, edit, and automate 3D environments and simulation scenarios for testing autonomous systems.
Driving Scenario Simulation
Driving Scenario Simulation tools enable engineers to design and test their algorithms in MATLAB and Simulink. Features I contributed to include: INS sensor integration; smooth, jerk-limited vehicle trajectories for simulation; Lidar point cloud integration; low-poly actor meshes; reverse motion in driving scenarios; road network data model for geographic maps such as HERE/OSM and OpenDRIVE; Driving Scenario Designer app; lanes ground truth specification, visualization, and detection; development of a Driving Scenario Reader block and Bird's-Eye Scope in Simulink.
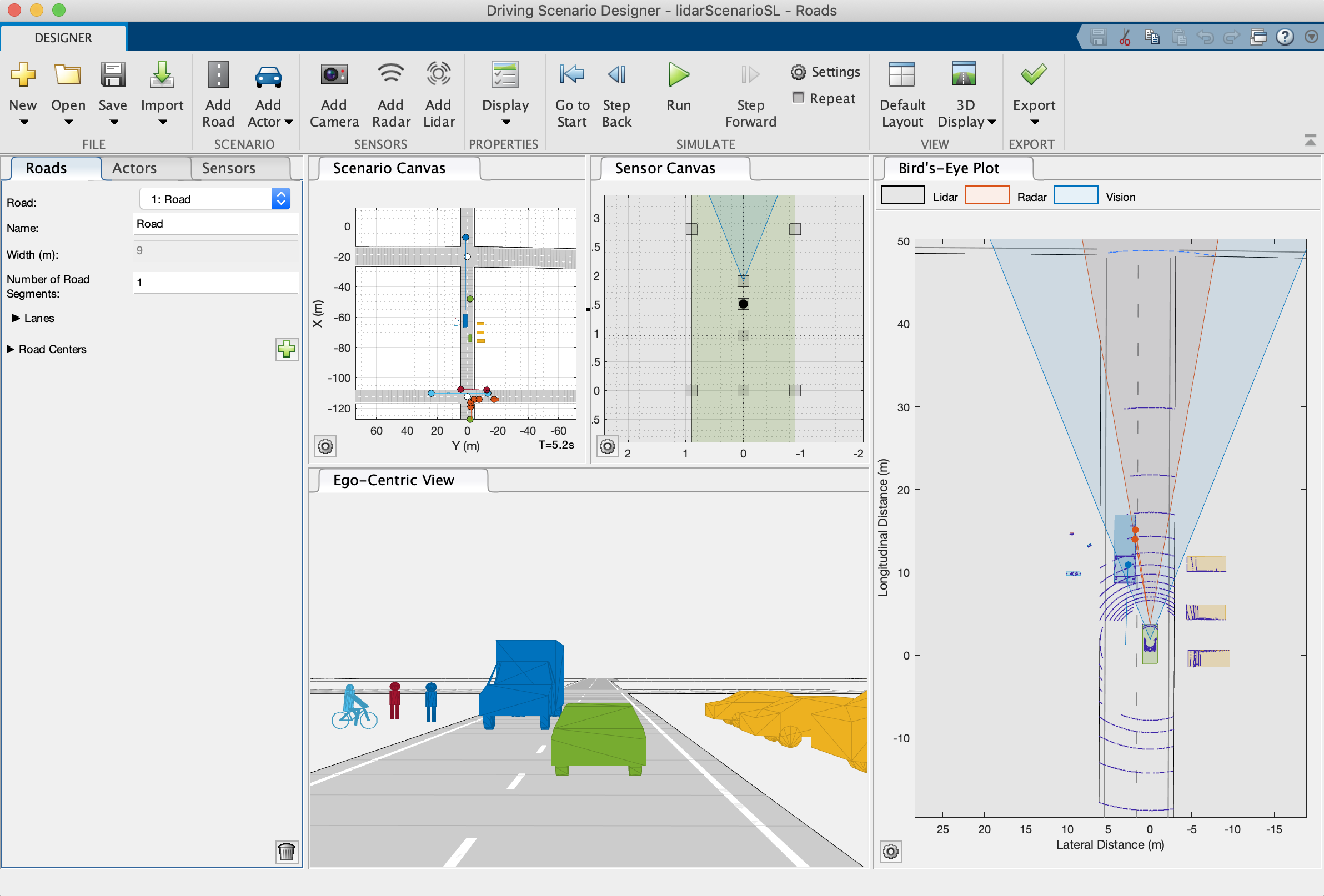
Driving Scenario Designer
Create virtual driving scenarios using the Driving Scenario Designer App. My contributions include building the canvas interactions, integrating Lidar and INS sensors, low-poly actor meshes, performance improvements, etc.
Shown below is an animation of an application developed using the drving scenario APIs and visualization capabilities.
Below is a video demonstrating some recent features in the driving scenarios area.
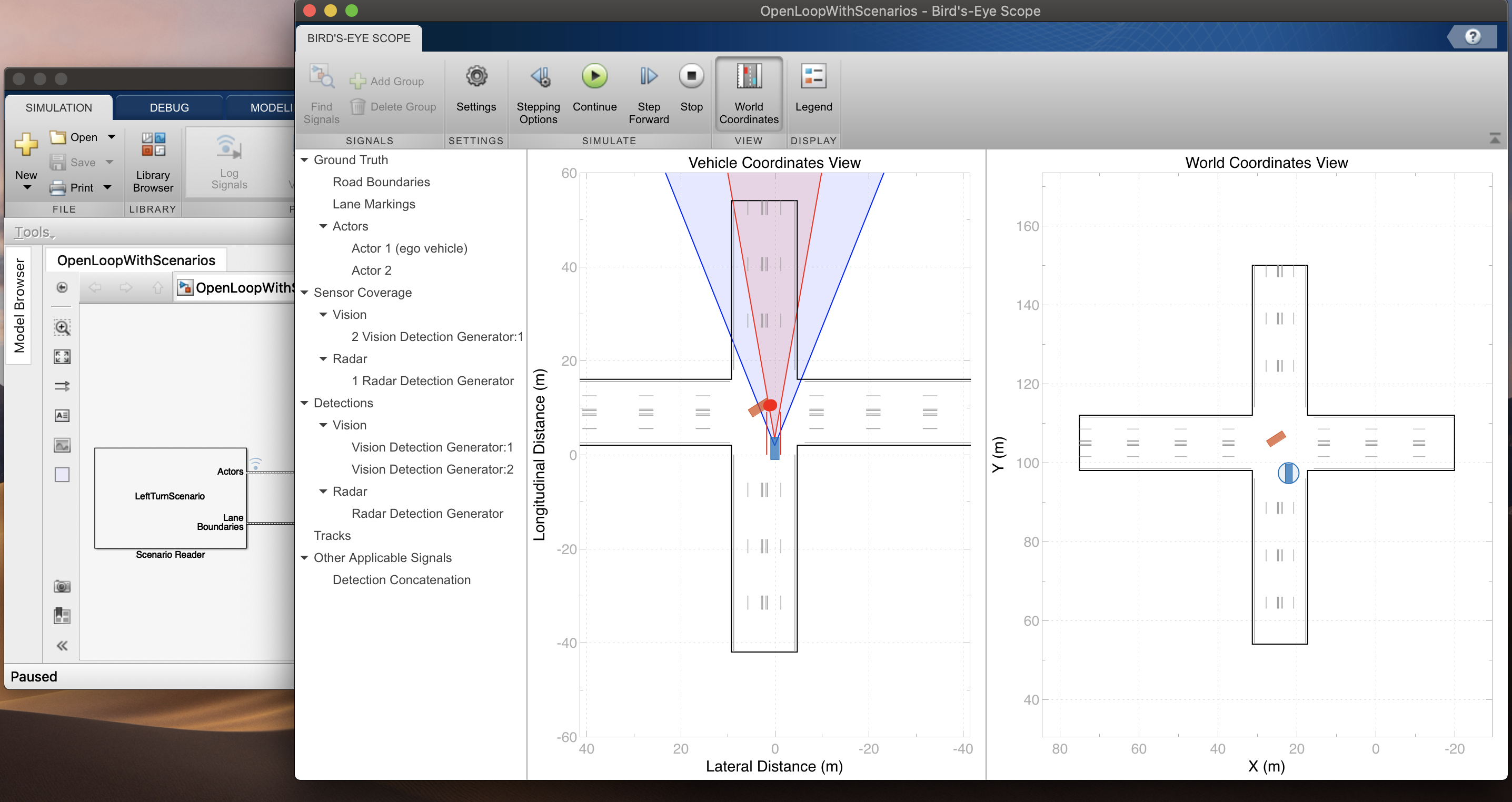
Bird's-Eye Scope
Visualize roads, actors, sensor detections, and tracks using the Bird's-Eye Scope in Simulink. My contributions include developing the data pipeline, grouping ground truth, detections, and coverages; Scenario Reader module, and integrating Lidar and INS sensor blocks in Simulink.